Gruppe 3: Katzennapf
Für die finale Challenge haben wir uns dazu entschieden, möglichst viele der erlernten Techniken zu kombinieren. Um das Thema zu treffen, haben wir uns für einen dekorativen Katzennapf entschieden, der sich bei Annäherung von erkannten Objekten wegbewegt und damit bewusst nicht den eigentlichen Sinn eines Napfes erfüllt.
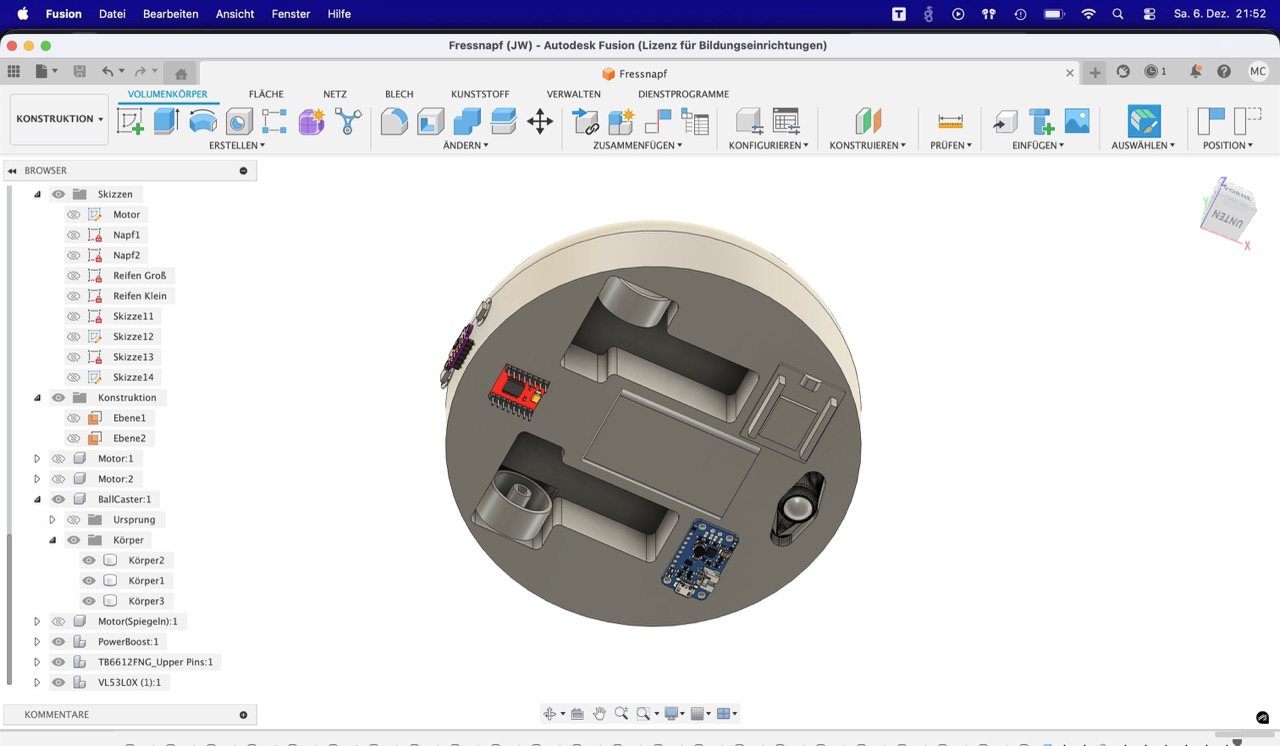
Begonnen wurde mit der Erstellung eines CAD-Modells in Fusion. Dieses wurde anschließend im 3D-Druckverfahren gefertigt und mit Schleifpapier unterschiedlicher Körnungen bearbeitet. Dabei durfte jedoch nicht zu viel Material entfernt werden, da das Modell mit geringem Infill gedruckt wurde, um Filament und Druckzeit zu sparen.
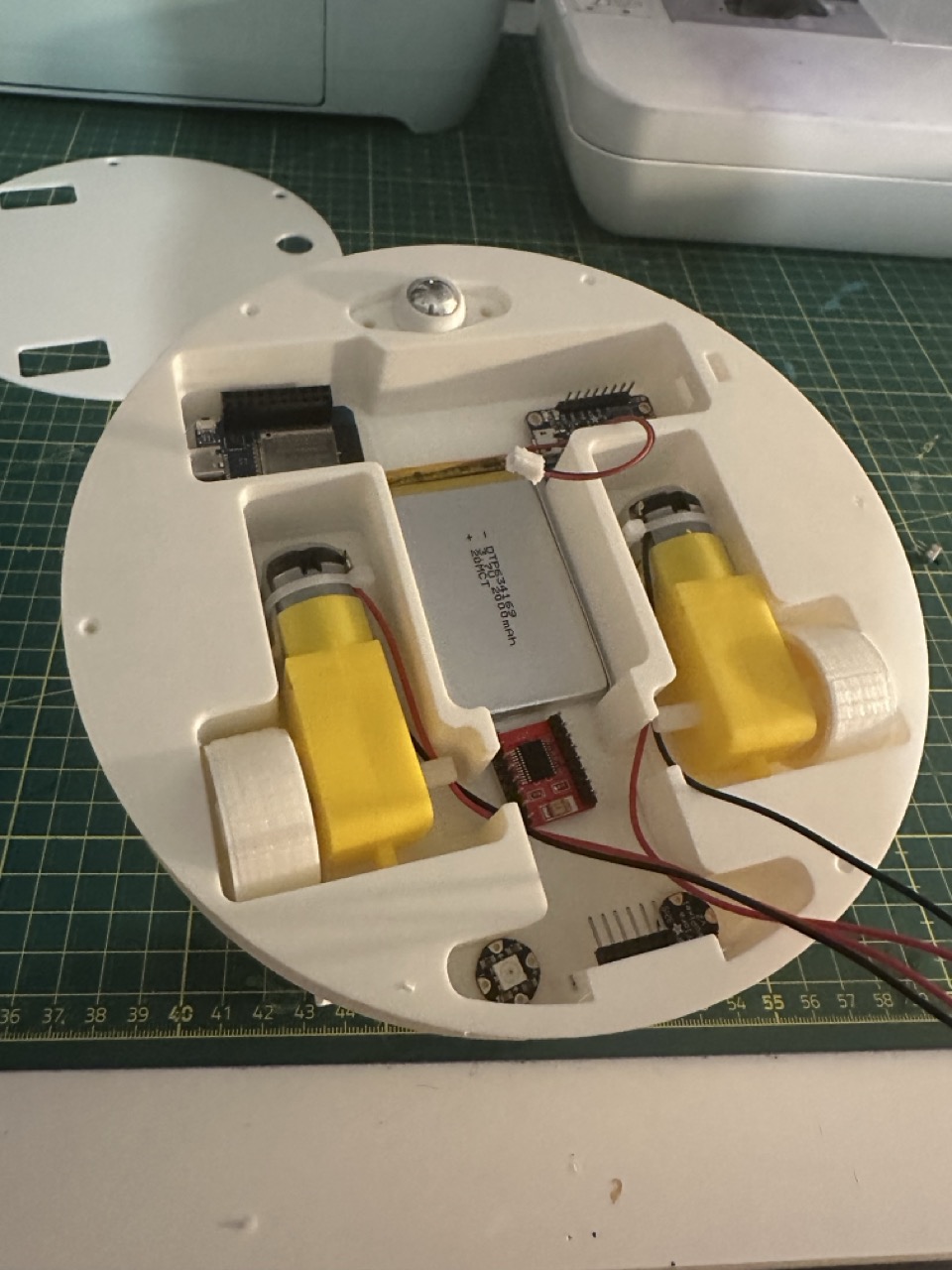
Nach dem Schleifen wurde ein Primer aufgetragen und eine Skizze erstellt, um festzulegen, wie es nachher bemalt werden soll. Das Modell wurde anschließend mit Acrylfarbe bemalt und mit Klarlack versiegelt. Danach folgte der elektronische Aufbau. Ein DC-Getriebemotor wurde über einen TB6612FNG-Motortreiber angesteuert. Zusätzlich wurden zwei NeoPixel-LEDs für die Augen, ein VL53L0X Time-of-Flight-Sensor zur Bewegungserkennung, ein 1200 mAh Lithium-Akku, ein USB-C Lithium Battery Charger Modul sowie ein MT3608 Step-Up-Modul zur Spannungsanhebung verbaut. Als Mikrocontroller kam ein ESP32 zum Einsatz, der entsprechend programmiert wurde.
Die beiden Motoren können separat gesteuert werden, was in Kombination mit der Kugelrolle eine freie Bewegung des Napfes ermöglicht, inspiriert von einem Staubsaugerroboter.