Gruppe 10: Schüchterner Spiegel
Für die Abschluss-Challenge sollten wir einen Gegenstand bauen, der nutzlos ist, und wir haben uns für einen Spiegel entschieden.
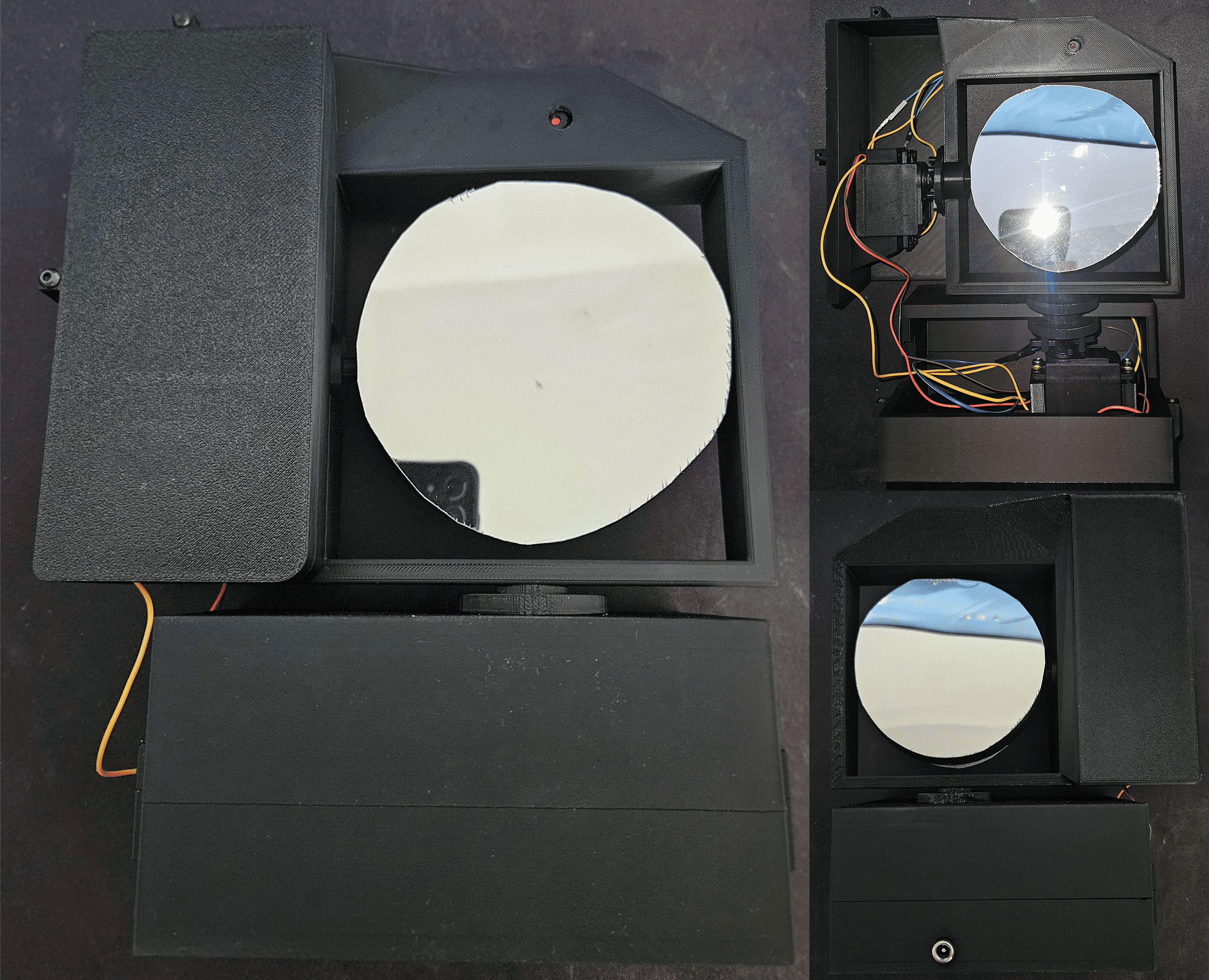
Unser Spiegel ist nämlich genau dann am „unnützesten“, wenn man ihn eigentlich braucht: Sobald sich jemand davorstellt, dreht er sich weg. Damit erfüllt er seinen eigentlichen Zweck nicht mehr, weil man sich nie wirklich darin sehen kann.
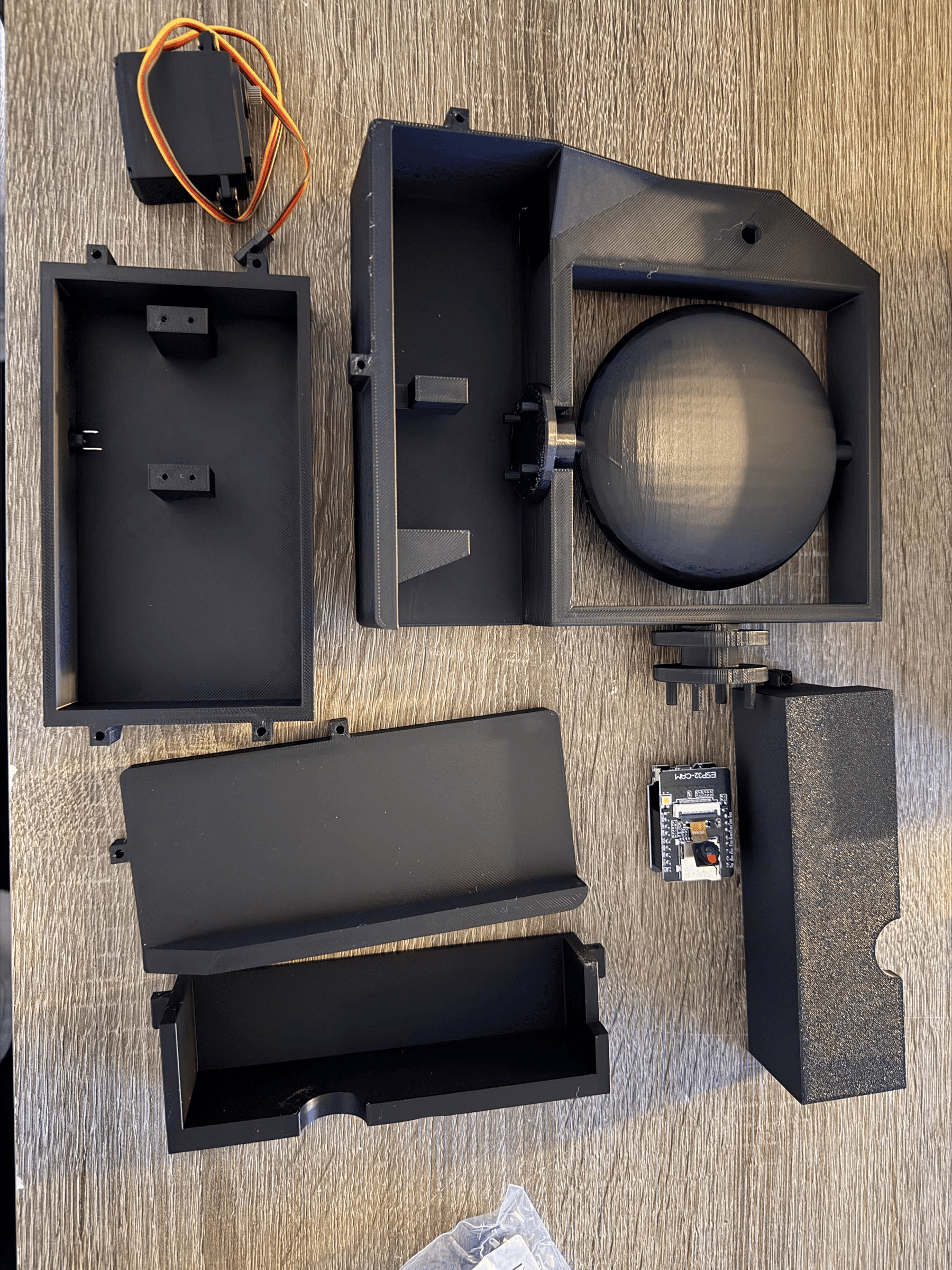
Damit das funktioniert, haben wir zwei Servomotoren verbaut:
- Einer übernimmt die Bewegung auf der Y-Achse und sitzt unten in der Box.
- Der zweite ist für die X-Achse zuständig und ist seitlich montiert.
Gesteuert wird alles über ein ESP32-CAM Modul. Das Modul ist so programmiert, dass es Gesichter erkennt. Sobald ein Gesicht im Bild ist, werden die Motoren angesteuert und der Spiegel wird automatisch vom Anwender wegdreht.
Auch das Gehäuse haben wir passend zu unserem Konzept entworfen und anschließend modelliert. Als Spiegeloberfläche haben wir klebbares Acrylglas verwendet.
Für die Stromversorgung wollten wir beide Motoren und die ESP32-CAM über eine DC-Buchse betreiben, die dann an ein externes Netzteil angeschlossen wird. Dabei hatte die ESP32-CAM allerdings leider Probleme mit der Stromversorgung, weshalb wir sie vorübergehend über ein USB-Kabel mit Strom versorgt haben, damit das System läuft.
PS: Im Nachhinein haben wir überprüft, warum der Spiegel während der Vorstellung nicht reagiert hat, und festgestellt, dass die ESP32-CAM beim Transport verrutscht ist.